DOOLIM-YASKAWA
- Painting
Solution - Automation
Solution - Engineering
Service - Smart
Solution - About Us
-
- Solution Component
- Robot Applicator System Device




- Painting
Solution - Automation
Solution - Service
- Smart
Solution - About Us
-
- Solution Component
- Robot Applicator System Device
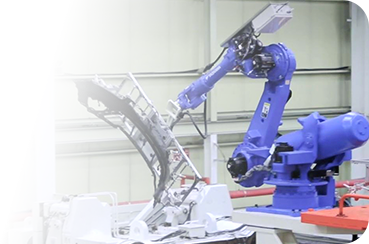
경로 자동화 시스템
샌딩·와이핑·폴리싱 공정을 완전 자동화합니다.
비정형 결함에도 정밀하게 대응하는
로봇 자동경로 생성 시스템
두림야스카와의 M.A.P(Motion Auto Path) 시스템은 비전 검사로 감지된 결함 좌표를 기반으로,
다중 로봇이 충돌 없이 최적 경로를 실시간으로 생성·실행하는 자동화 솔루션입니다.
샌딩·와이핑·폴리싱 등 다양한 공정 툴에 대응하며, 경쟁사 대비 CT(사이클 타임) 70% 감소를 달성합니다.
M.A.P 시스템 핵심 성능
결함 좌표 수신부터 로봇 프로그램 전송까지 총 2초, 경쟁사 대비 70% 감소한 사이클 타임을 실현합니다.
결함 좌표 수신에서
최종 로봇 프로그램 전송까지
전체 처리 시간 2초
최적 경로 알고리즘과
다중 로봇 동시 작업으로
생산성을 획기적으로 향상
Motosim 기반 사전 공정 검토,
실 로봇과 99% 동일한
정밀 시뮬레이션 제공
다중 로봇 작업 할당 방법 및
포스쳐 그래프 생성 방법
2건 특허 출원 완료
M.A.P 시스템 구성
비전 검사에서 수신된 결함 좌표를 기반으로 Manager PC가 작업을 분배하고, Planner PC가 각 로봇별 최적 경로를 생성합니다. 3D 비전 보정 데이터를 실시간으로 반영하여 차체 위치 편차에도 정밀한 작업이 가능합니다.
- 비전 검사 공정
- 샌딩 / 와이핑 / 폴리싱 공정
- 3D 위치 보정 공정
- 툴 타입에 따른 공정 구성 가능
- 검사/보정 비전 (Pickit)
- Leica LaserTraker — BODY 측정
- Leica T-Scan — 정밀 스캔
- Leica RTC 360 — 작업장 환경 측정
- MAP Manager (Zone당 PC 1대) — 공정 통합 제어 및 경로 생성
- MAP Planner (로봇 2대당 PC 1대) — 작업 송수신, 위치 보정, 샌딩 포인트 전달
- Motosim — 99% 동일 시뮬레이션
M.A.P 샌딩 자동경로 생성 응용 시퀀스
비전 검사 결과 수신부터 최종 작업 결과 디스플레이까지 6단계 자동화 시퀀스로 진행됩니다.
비전 검사 PC에서 감지된 결함 좌표를 Manager로 전송합니다.
Manager가 로봇별 작업 분배 후 Planner에 최적 경로 생성을 요청합니다.
3D 비전으로 차체 및 무빙 파트의 마스터바디 대비 위치 편차를 측정합니다.
측정된 3D 비전 데이터를 적용하여 경로를 정밀 보정합니다.
최종 최적 경로가 반영된 로봇 프로그램을 각 로봇에 전송합니다.
샌딩 결과를 디스플레이하고, 미샌딩 이물에 대해 작업자 추가 작업을 진행합니다.
M.A.P 시스템 특장점
 비정형 물질 완전 자동화
이물·결함 등 불규칙한 대상물의 위치와
비정형 물질 완전 자동화
이물·결함 등 불규칙한 대상물의 위치와형상에 관계없이 자동으로 최적 경로를 생성하여 작업합니다.
 충돌 방지 & 정밀도
가상 간섭물 기반 분산 경로 생성으로
충돌 방지 & 정밀도
가상 간섭물 기반 분산 경로 생성으로다중 로봇 간 충돌을 방지하며 정밀 작업을 보장합니다.
 고속 실시간 경로 생성
총 CT 2초 — 경쟁사 대비 70% 감소.
고속 실시간 경로 생성
총 CT 2초 — 경쟁사 대비 70% 감소.최적 경로와 속도로 생산성을 극대화합니다.
 3D 위치 자동 보정
Leica 측정 장비 연동으로 차체·무빙 파트의
3D 위치 자동 보정
Leica 측정 장비 연동으로 차체·무빙 파트의위치 편차를 실시간 반영한 경로 보정을 수행합니다.
 다중 툴 공정 대응
샌딩·와이핑·폴리싱 등 다양한 툴 타입에
다중 툴 공정 대응
샌딩·와이핑·폴리싱 등 다양한 툴 타입에따라 유연하게 공정 구성을 변경할 수 있습니다.
 정밀 사전 시뮬레이션
Motosim을 활용한 사전 공정 검토로
정밀 사전 시뮬레이션
Motosim을 활용한 사전 공정 검토로실 로봇과 99% 동일한 정밀도의 시뮬레이션을 제공합니다.
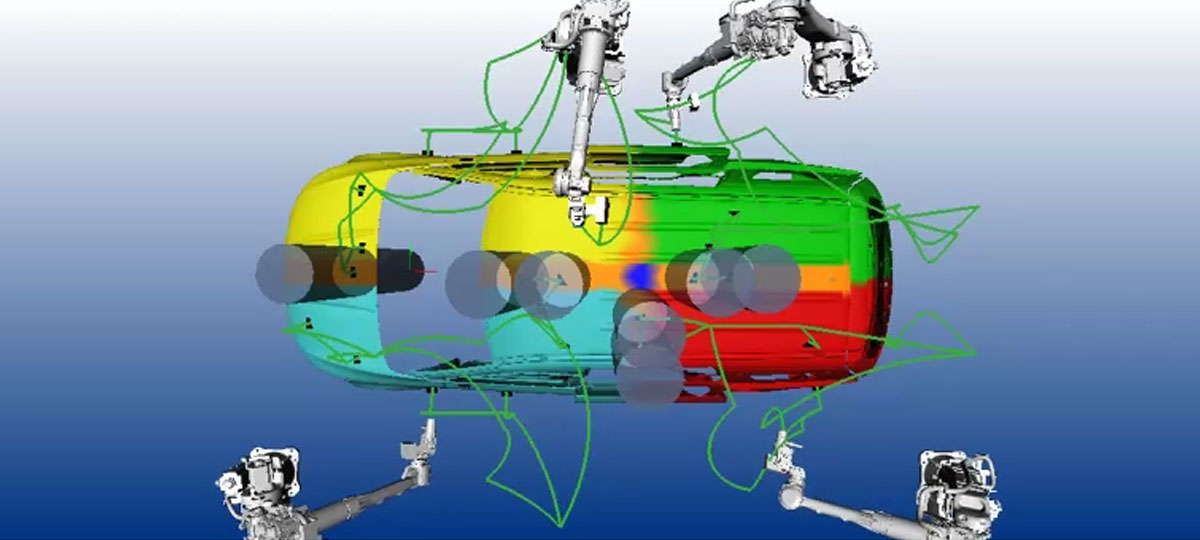
M.A.P 경로생성 알고리즘 작동 원리
3단계 알고리즘을 통해 충돌 방지, 최적 경로, 정밀도를 동시에 실현합니다.
로봇별 결함 우선순위에 따라 작업점을 할당합니다. 다중 로봇 작업 할당 시 일정 거리(Collision Spec.) 내 타 로봇의 작업 분배를 방지하여 충돌을 예방합니다.
충돌회피 CT 최소화보정값 적용 후 충돌 체크를 수행하며 최단·최적 경로를 생성합니다. 가상 간섭물 기반 분산 경로 생성으로 경로 생성 속도를 대폭 향상시킵니다.
최적경로 속도작업점 증대를 위해 검증된 최적 경로를 각 로봇에 전송합니다. 다음 작업점이 다른 영역에 속하더라도 고정 경유점 없이 최단 거리로 이동하는 경로를 생성합니다.
정밀도 안정성포스쳐 그래프 (Posture Graph)
두림야스카와 독자 설정 기술
작업점이 생성되는 부위별로 영역을 구분하고, 각 영역마다 최적 경로 생성을 위한 설정값을 적용합니다. 로봇 툴 끝단을 작업점에 위치시키고 남은 회전 방향 자유도를 결정하는 정교한 알고리즘입니다.
로봇 툴 끝단의 방향을 작업점에 최적화하여 결정합니다.
로봇 간섭 가능 영역에 머무는 시간을 최소화하는 접근 방향 오프셋을 설정합니다.
가상 간섭물 기반으로 타 로봇에게 할당된 작업점을 간섭물로 전달, 충돌 회피를 실현합니다.
인접 최소화 영역 순서를 설정하여 이동 거리를 줄이고 작업 효율을 높입니다.
가장자리 과샌딩을 방지하고 캐릭터 라인 보호를 위한 곡률 민감도를 설정합니다.
다중 로봇 작업 분배 시 충돌 방지 거리를 설정하고, 직접 이동 가능 영역을 지정합니다.
사이클 타임
CT 감소율
충돌 방지
시뮬레이션 정확도
적용 공정
전착 샌딩부터 상도 폴리싱까지, 다양한 도장 공정에 M.A.P 자동경로 생성 시스템을 적용합니다.
전착 샌딩 및 상도 샌딩 공정에 적용. 결함 좌표 기반으로 정밀한 샌딩 경로를 자동 생성하여 과샌딩을 방지하고 품질을 균일하게 유지합니다.
도장 전처리 와이핑 공정에 적용. 로봇이 최적 경로로 차체 표면을 균일하게 와이핑하여 도장 품질의 기초를 확보합니다.
상도 폴리싱 공정에 적용. 캐릭터 라인 회피 알고리즘으로 차체의 굴곡과 가장자리를 정밀하게 관리하며 광택을 극대화합니다.
핵심 기술 특허 출원
M.A.P 시스템의 핵심 알고리즘은 두림야스카와 자체 개발로 특허 출원 완료되었습니다.
다수의 로봇이 동시에 작업할 때 충돌을 방지하며 각 로봇에 최적의 작업점을 할당하는 방법에 관한 특허입니다.
출원번호 10-2025-0140923작업점 부위별 영역 구분과 최적 로봇 자세 결정을 위한 포스쳐 그래프를 공정 설계 기반으로 자동 생성하는 방법에 관한 특허입니다.
출원번호 10-2025-0108043



